 数据结构
数据结构
# 数据结构与算法分析
# 排序算法
排序算法是最常用的算法之一,它用于对数据集合进行排列。这里将介绍一些常见的排序算法:冒泡排序、快速排序、归并排序、插入排序、选择排序和堆排序。
# 1. 冒泡排序 (Bubble Sort)
冒泡排序是一种简单的排序算法,它通过重复交换相邻未按顺序排列的元素,直到整个序列按顺序排列。每一轮操作将最大元素“冒泡”到最后。
时间复杂度:
- 最坏和平均时间复杂度为 O(n²),最好的情况下为 O(n)(当数组已经排序时)。
空间复杂度:
- O(1),只需要常数空间。
public class BubbleSort {
public static void bubbleSort(int[] arr) {
int n = arr.length;
for (int i = 0; i < n - 1; i++) {
for (int j = 0; j < n - i - 1; j++) {
if (arr[j] > arr[j + 1]) {
// 交换 arr[j] 和 arr[j + 1]
int temp = arr[j];
arr[j] = arr[j + 1];
arr[j + 1] = temp;
}
}
}
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
# 2. 插入排序 (Insertion Sort)
插入排序将每个元素插入到已排序的部分,逐步形成一个完整的排序序列。
时间复杂度:
- 最坏和平均时间复杂度为 O(n²),最好的情况下为 O(n)(当数组已经排序时)。
空间复杂度:
- O(1),只需要常数空间。
public class InsertionSort {
public static void insertionSort(int[] arr) {
for (int i = 1; i < arr.length; i++) {
int key = arr[i];
int j = i - 1;
while (j >= 0 && arr[j] > key) {
arr[j + 1] = arr[j];
j = j - 1;
}
arr[j + 1] = key;
}
}
}
2
3
4
5
6
7
8
9
10
11
12
13
# 3. 选择排序 (Selection Sort)
选择排序每次从未排序的部分中选择最小元素,放到已排序部分的末尾。
时间复杂度:
- O(n²),无论输入数据是否有序。
空间复杂度:
- O(1),只需要常数空间。
public class SelectionSort {
public static void selectionSort(int[] arr) {
int n = arr.length;
for (int i = 0; i < n - 1; i++) {
int minIdx = i;
for (int j = i + 1; j < n; j++) {
if (arr[j] < arr[minIdx]) {
minIdx = j;
}
}
// 交换元素
int temp = arr[minIdx];
arr[minIdx] = arr[i];
arr[i] = temp;
}
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
# 4. 快速排序 (Quick Sort)
快速排序采用分治法,将数组分为较小的部分进行排序,最终合并。它选择一个“基准”元素,将大于基准的元素移到右边,小于基准的元素移到左边,然后递归对这两部分继续排序。
时间复杂度:
- 最坏时间复杂度为 O(n²),最好的情况下为 O(n log n)。
空间复杂度:
- O(log n),栈的深度。
public class QuickSort {
public static void quickSort(int[] arr, int low, int high) {
if (low < high) {
int pi = partition(arr, low, high);
quickSort(arr, low, pi - 1);
quickSort(arr, pi + 1, high);
}
}
private static int partition(int[] arr, int low, int high) {
int pivot = arr[high];
int i = (low - 1);
for (int j = low; j < high; j++) {
if (arr[j] <= pivot) {
i++;
int temp = arr[i];
arr[i] = arr[j];
arr[j] = temp;
}
}
int temp = arr[i + 1];
arr[i + 1] = arr[high];
arr[high] = temp;
return i + 1;
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
# 5. 归并排序 (Merge Sort)
归并排序也是一种分治法排序算法,它将数组分成两个子数组,分别排序后合并。它具有稳定性,适合大规模数据排序。
时间复杂度:
- O(n log n),不受输入数据的影响。
空间复杂度:
- O(n),需要额外的空间来存储中间数组。
public class MergeSort {
public static void mergeSort(int[] arr, int left, int right) {
if (left < right) {
int mid = (left + right) / 2;
mergeSort(arr, left, mid);
mergeSort(arr, mid + 1, right);
merge(arr, left, mid, right);
}
}
private static void merge(int[] arr, int left, int mid, int right) {
int n1 = mid - left + 1;
int n2 = right - mid;
int[] L = new int[n1];
int[] R = new int[n2];
System.arraycopy(arr, left, L, 0, n1);
System.arraycopy(arr, mid + 1, R, 0, n2);
int i = 0, j = 0, k = left;
while (i < n1 && j < n2) {
if (L[i] <= R[j]) {
arr[k++] = L[i++];
} else {
arr[k++] = R[j++];
}
}
while (i < n1) arr[k++] = L[i++];
while (j < n2) arr[k++] = R[j++];
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
# 6. 堆排序 (Heap Sort)
堆排序基于完全二叉树的堆结构。它将数组视为一个二叉堆,最大堆或最小堆,然后通过反复移除根节点来构建排序序列。
时间复杂度:
- O(n log n),无论输入数据是否有序。
空间复杂度:
- O(1),只需要常数空间。
public class HeapSort {
public static void heapSort(int[] arr) {
int n = arr.length;
// 构建最大堆
for (int i = n / 2 - 1; i >= 0; i--) {
heapify(arr, n, i);
}
// 一次次移除根节点,调整堆
for (int i = n - 1; i >= 0; i--) {
int temp = arr[0];
arr[0] = arr[i];
arr[i] = temp;
heapify(arr, i, 0);
}
}
private static void heapify(int[] arr, int n, int i) {
int largest = i;
int left = 2 * i + 1;
int right = 2 * i + 2;
if (left < n && arr[left] > arr[largest]) largest = left;
if (right < n && arr[right] > arr[largest]) largest = right;
if (largest != i) {
int swap = arr[i];
arr[i] = arr[largest];
arr[largest] = swap;
heapify(arr, n, largest);
}
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
# 树结构
树结构广泛应用于搜索、排序和分层数据存储等领域。常见的树包括完全二叉树、前缀树、二叉搜索树、AVL 树和红黑树。
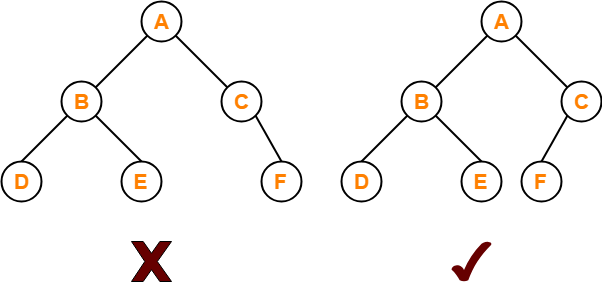
# 1. 完全二叉树 (Complete Binary Tree)
完全二叉树是一种特殊的二叉树,具有以下核心特点:
- 层级填充:除了可能最后一层外,所有层都必须填满节点。
- 靠左排列:最后一层的节点必须从左到右依次排列,不能有空隙。
换句话说,它是一棵“几乎满”的二叉树,最后一层可以不满,但节点必须集中在左侧。
基本性质
- 高度:如果树高为
,前 层是满的,每层有 个节点( 是层号)。 - 节点数:范围在
到 之间。 - 存储方式:可以用数组表示,节点按层序排列,方便访问子节点和父节点。
# 2. 前缀树 (Trie)
前缀树,又称 字典树 或 Trie 树,是一种专门用于处理字符串的树形数据结构。它的核心思想是通过共享前缀来高效存储和检索一组字符串。
基本概念
节点结构:
- 每个节点代表一个字符。
- 从根节点到某个节点的路径表示一个字符串的前缀。
- 根节点通常是空的(不代表任何字符)。
特点:
- 共享前缀:具有相同前缀的字符串共享路径上的节点,从而节省存储空间。
- 叶子节点或标记:通常用一个特殊标记(比如布尔值
isEnd)表示从根到该节点是否构成一个完整的单词。
用途:
- 快速查找某个字符串是否存在。
- 检索具有特定前缀的所有字符串(前缀查询)。
- 常用于自动补全、拼写检查、字典实现等。
简单例子
假设要存储字符串 "cat"、"car" 和 "dog":
(根)
/ | \
c d ...
/ |
a o
/ \ |
t r g
2
3
4
5
6
7
- 路径
c -> a -> t表示"cat"。 - 路径
c -> a -> r表示"car"。 - 路径
d -> o -> g表示"dog"。 "ca"是"cat"和"car"的共享前缀。
# 3. 二叉搜索树 (BST)
**二叉搜索树(Binary Search Tree, BST)**是一种特殊的二叉树,每个节点的值大于左子树所有值,小于右子树所有值。它支持高效的搜索、插入、删除,时间复杂度取决于树高
简单例子
假设有一棵 BST:
5
/ \
3 7
/ \ \
1 4 8
2
3
4
5
- 根节点是 5。
- 左子树 (3, 1, 4) 都小于 5。
- 右子树 (7, 8) 都大于 5。
- 中序遍历结果:1, 3, 4, 5, 7, 8(递增顺序)。
基本操作
- 搜索:
- 从根开始,若目标值小于当前节点值,去左子树;若大于,去右子树;相等则找到。
- 时间复杂度:
, 是树高。
- 插入:
- 类似搜索,找到合适位置插入新节点。
- 时间复杂度:
。
- 删除:
- 删除节点时需调整树结构(分情况:无子节点、一个子节点、两个子节点)。
- 时间复杂度:
。
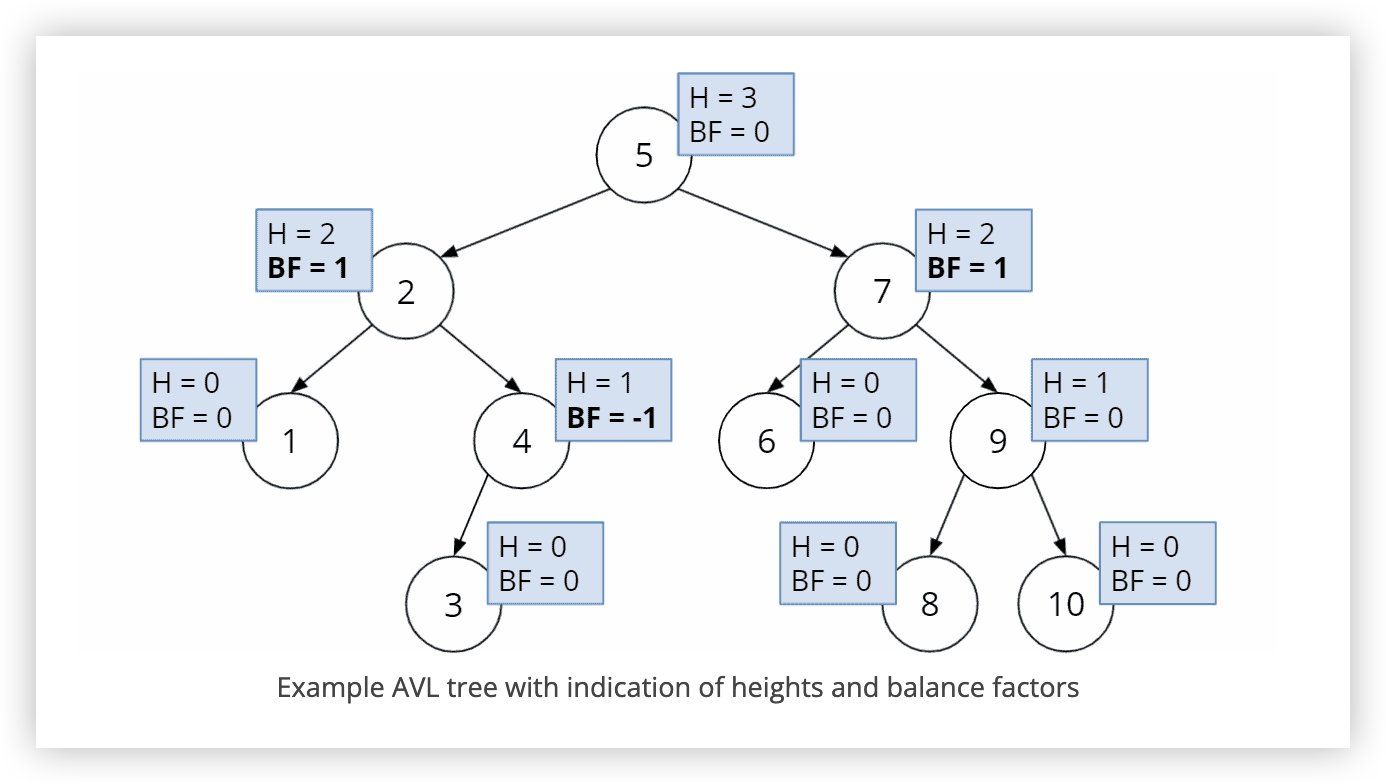
# 4. AVL 树
AVL 树是一种自平衡的二叉搜索树,确保任意节点的左右子树高度差(平衡因子)不超过 1,从而在最坏情况下也能保持 O(log n) 的时间复杂度。
时间复杂度:
- 查找操作: 由于树的高度被限制在 O(log n),查找操作的时间复杂度为 O(log n)。
- 插入和删除操作:在最坏情况下,插入和删除操作需要进行旋转调整,以维持树的平衡,时间复杂度仍为 O(log n)。
空间复杂度:
- AVL 树的空间复杂度为 O(n),其中 n 是树中节点的数量。
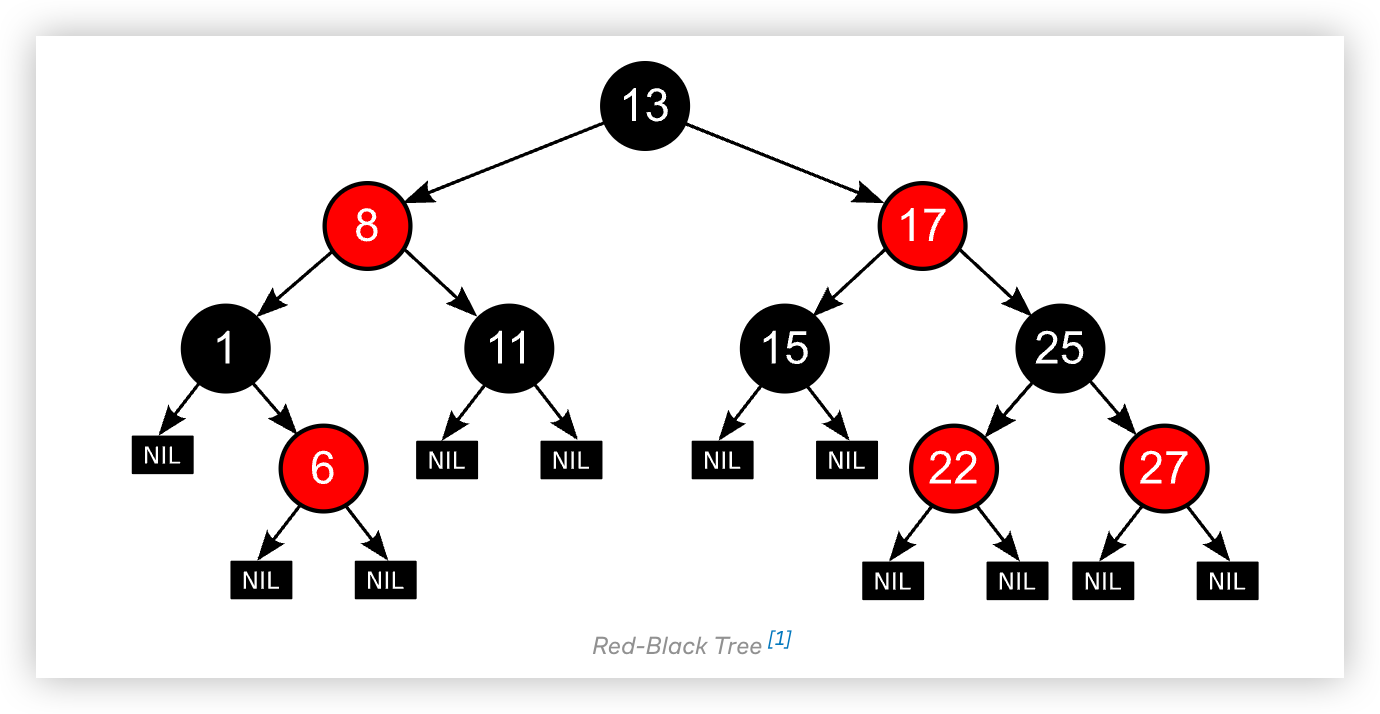
# 5. 红黑树
红黑树是一种自平衡的二叉搜索树,每个节点带有红色或黑色属性,通过五条规则保持平衡:根节点为黑色、叶子(NIL)为黑色、红色节点的子节点必须为黑色、从根到叶子的每条路径黑色节点数相同、节点非红即黑。这些规则确保树高最多为
时间复杂度:
- 查找操作: 由于树高被限制在
,查找操作的时间复杂度为 。 - 插入和删除操作: 在最坏情况下,插入和删除需要颜色调整和旋转以维持平衡,时间复杂度仍为
。
空间复杂度:
- 红黑树的空间复杂度为
,其中 是树中节点的数量。
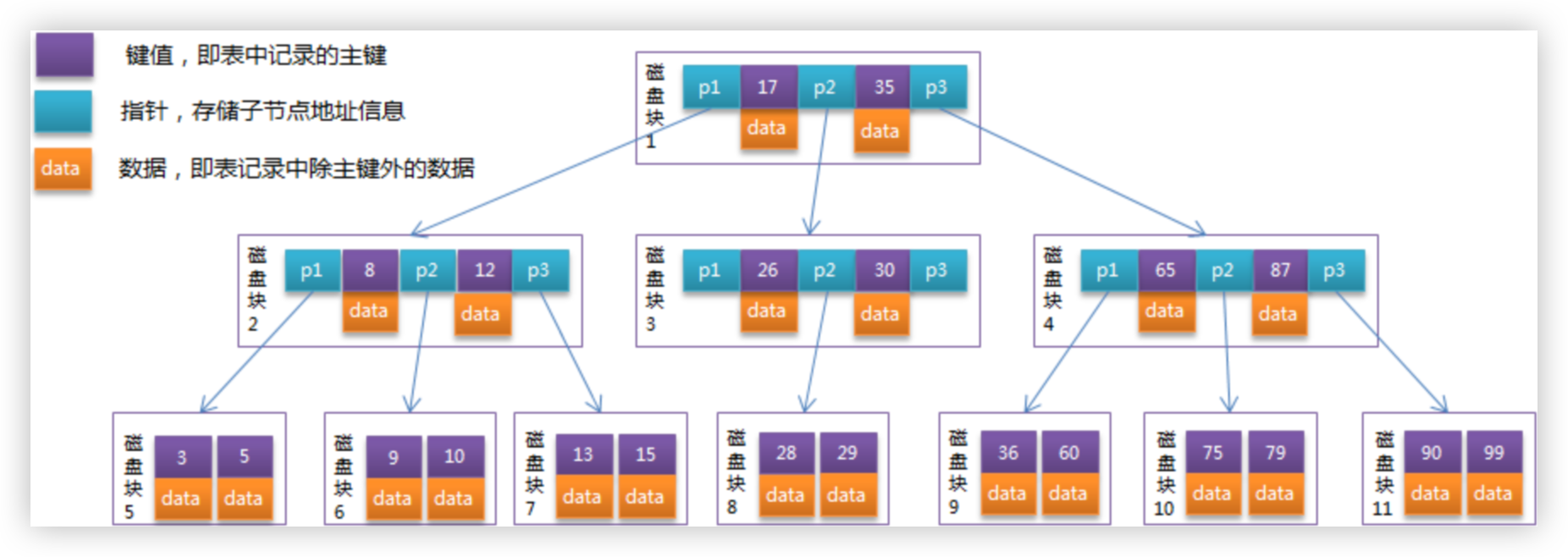
# 6. B 树与 B+ 树
B树和B+树是两种高效的多路平衡搜索树,广泛应用于数据库和文件系统中,用于管理大量数据并优化磁盘访问。以下是它们的核心特点和对比:
# 1. B树(B-Tree)
特点:
- 多路平衡:每个节点最多有
m个子节点(m阶B树),且所有叶子节点在同一层。 - 键值分布:每个节点包含多个键(
k个)和子节点指针(k+1个),键按升序排列,子节点键值范围由其父节点键分割。 - 数据存储:所有节点都可能存储数据(键关联实际数据或指针)。
优势:
- 减少磁盘I/O:矮胖的树形结构降低树的高度,减少磁盘访问次数。
- 平衡性:插入、删除时通过分裂、合并节点自动维持平衡。
- 适用场景:适合读写操作混合且数据量大的场景,如文件系统(NTFS、ReiserFS)。
示例:
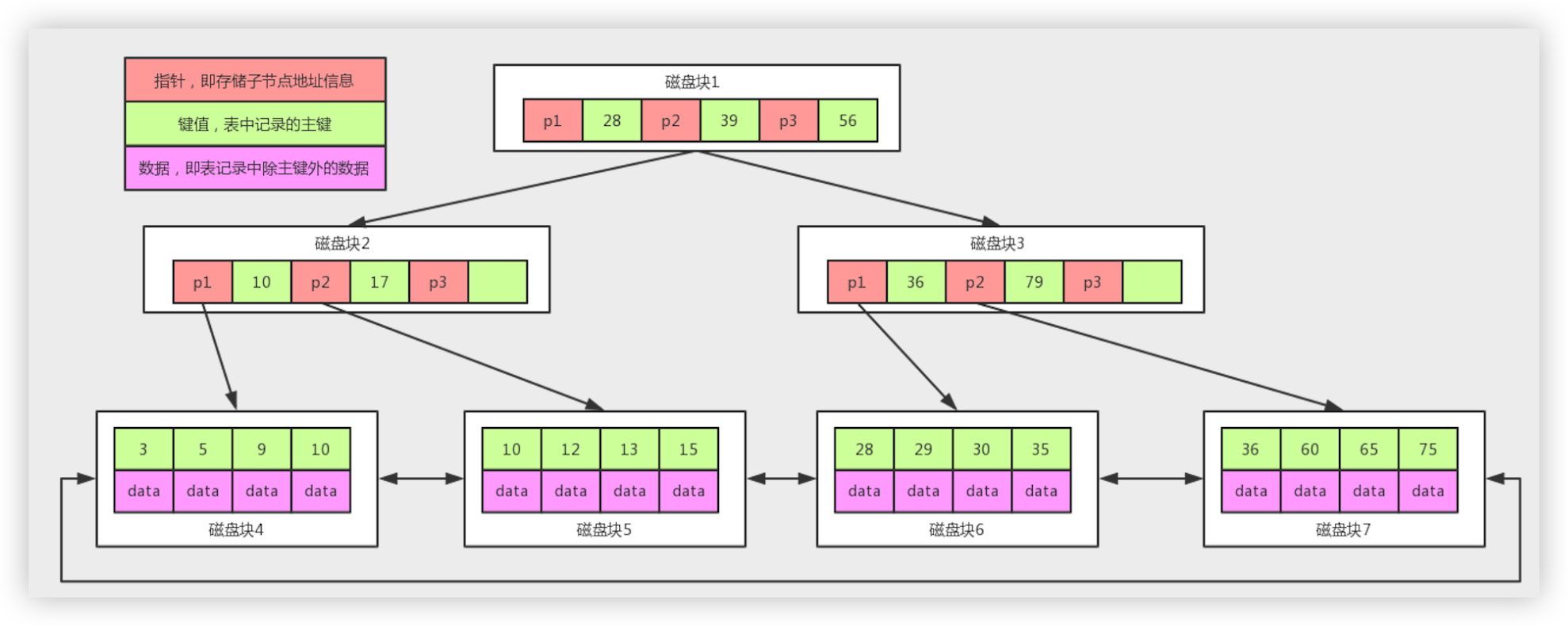
# 2. B+树(B+ Tree)
特点:
- 数据仅存于叶子:内部节点仅存储键和子节点指针,所有数据记录集中在叶子节点。
- 叶子链表:叶子节点通过指针形成有序链表,支持高效的范围查询。
- 键冗余:内部节点的键会在叶子节点中重复出现(作为子树的最大/最小值)。
优势:
- 更稳定的查询:任何查询都需到叶子节点,时间复杂度一致。
- 高效范围查询:链表结构直接遍历叶子节点即可,无需回溯树。
- 更优的磁盘I/O:内部节点可存储更多键,进一步降低树的高度。
- 适用场景:数据库索引(如MySQL InnoDB),强调范围查询和顺序访问。
示例:
# 3. 对比
| 特性 | B树 | B+树 |
|---|---|---|
| 数据存储位置 | 所有节点均可存数据 | 仅叶子节点存储数据 |
| 叶子节点结构 | 独立,无链表连接 | 通过指针形成有序链表 |
| 查询稳定性 | 可能在内部节点命中,时间不固定 | 必须到叶子节点,时间稳定 |
| 范围查询效率 | 低效(需中序遍历) | 高效(直接遍历叶子链表) |
| 空间利用率 | 内部节点存储数据,占用更多空间 | 内部节点仅存键,空间利用率更高 |
| 适用场景 | 文件系统、特定数据库(MongoDB) | 关系型数据库(MySQL)、大数据索引 |
# 跳表
跳表(Skip List)是一种随机化的数据结构,本质上是对有序链表的优化 —— 通过在链表基础上增加 “索引层”,实现快速查询、插入和删除操作,平均时间复杂度可达 O (log n),性能接近平衡树(如红黑树),但实现更简单。
# 1. 跳表的核心结构
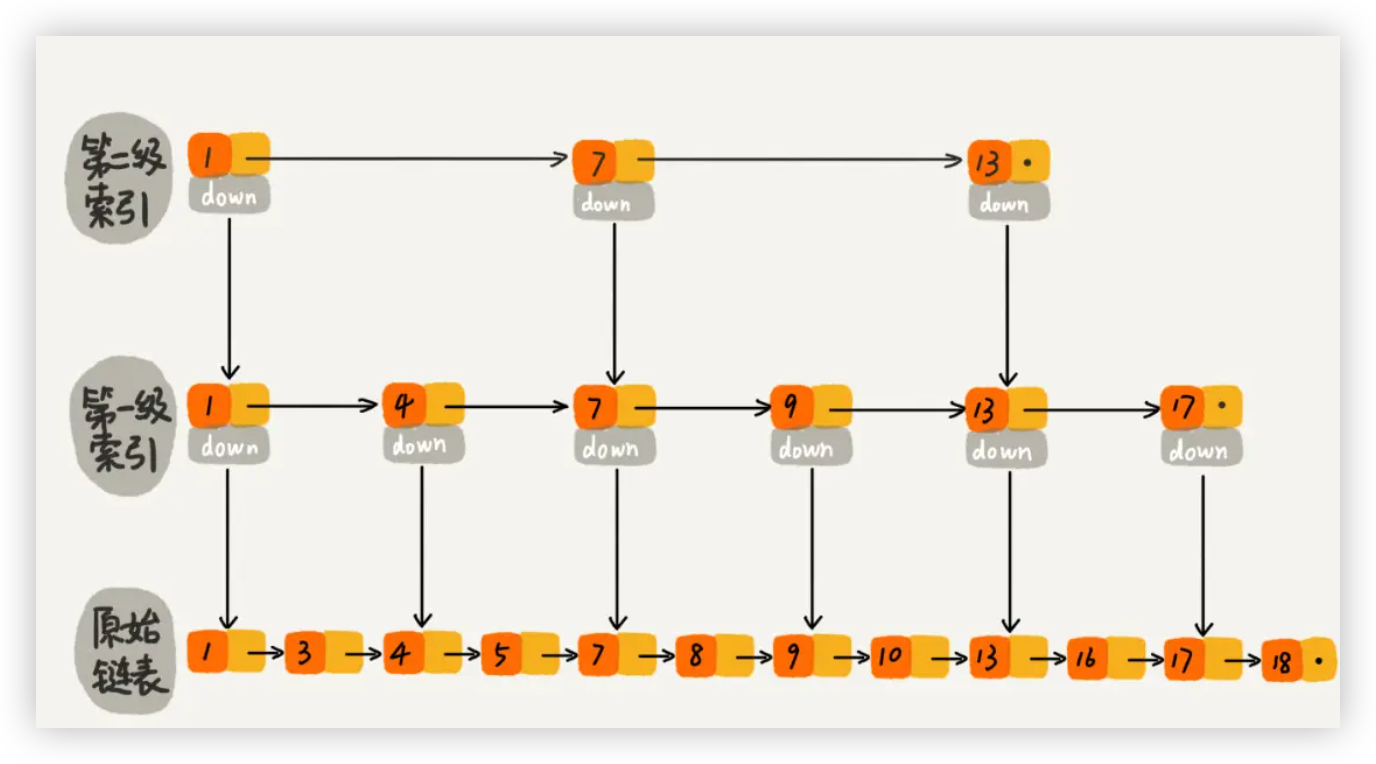
跳表的底层是一个有序链表(节点按 key 从小到大排列),在此基础上增加了多层 “索引”:
- 最底层(Level 0)是完整的有序链表,包含所有节点;
- 上层索引(Level 1, 2, ..., k)是对下层链表的 “抽样”,每个索引节点指向下层对应节点,用于快速跳过部分节点;
- 索引层级越高,节点越稀疏(类似金字塔结构)。
示例:
假设底层链表为 1 → 3 → 5 → 7 → 9,可能的索引结构:
- Level 1(上层索引):
1 → 5 → 9(每个节点间隔 1 个底层节点); - Level 2(更高层索引):
1 → 9(间隔 3 个底层节点);
查询时,从最高层索引开始,快速跳过不可能包含目标的区间,最终定位到底层节点。
# 2. 跳表的核心操作
# 1. 查询
- 从最高层索引的头节点开始,沿当前层向右遍历:
- 若下一个节点的 key ≤ 目标 key,继续向右;
- 若下一个节点的 key > 目标 key,下降到下一层,重复上述过程;
- 直到在底层链表找到目标节点(或确认不存在)。
优势:通过高层索引跳过大量节点,避免遍历整个链表(时间复杂度从 O (n) 优化为 O (log n))。
# 2. 插入
- 先通过查询逻辑找到插入位置;
- 随机生成索引层级:新节点插入底层后,通过随机算法(如抛硬币)决定是否晋升到上层索引(层级越高,概率越低,通常最高层级有上限);
- 逐层插入索引节点,指向下层对应节点。
随机层级的意义:避免索引层级集中,保证跳表的 “平衡性”(类似平衡树的旋转作用,但实现更简单)。
# 3. 删除
- 先找到目标节点及其所有层级的索引节点;
- 从最高层开始,逐层删除索引节点,最后删除底层链表节点。
# 面试题
# 1.为什么 HashMap 选用红黑树而不选择 AVL 树?
在 JDK 1.8 中,HashMap 当链表长度超过阈值(默认 8)时会转为红黑树,主要原因是红黑树在插入、删除操作的效率上优于 AVL 树,更适合 HashMap 的动态场景。
- AVL 树:是一种严格平衡的二叉搜索树,要求左右子树高度差不超过 1,因此插入 / 删除时可能需要频繁旋转(最多 O (log n) 次),虽然查询效率极高(O (log n)),但维护成本高。
- 红黑树:是一种 “近似平衡” 的二叉搜索树,通过颜色规则(红黑节点交替、根黑叶黑等)保证最长路径不超过最短路径的 2 倍,插入 / 删除时旋转次数更少(最多 2 次),虽然查询效率略低于 AVL 树,但整体动态性能更优。
HashMap 的场景特点是插入和删除频繁,且对查询效率的要求无需 “严格平衡”(近似平衡已足够),因此红黑树的性价比更高。
# 2.为什么数据库索引选择 B + 树而不选择其他树(如 B 树、二叉搜索树)?
数据库索引需要适配磁盘 IO 特性(读写速度慢、按页读取),B + 树的结构设计恰好能最小化磁盘 IO 次数,同时优化范围查询。
与二叉搜索树(如红黑树)对比:
- 二叉搜索树的高度较高(O (log n),但基数大时绝对高度大),会导致磁盘 IO 次数多(每一层对应一次 IO)。
- B + 树是多路平衡查找树,一个节点可以存储多个关键字(如 1000 个),因此高度极低(通常 3-4 层),能大幅减少 IO 次数(3-4 次 IO 即可完成查询)。
与 B 树对比:
B 树的非叶子节点也存储数据,导致每个节点存储的关键字数量少,高度更高,且范围查询需要回溯(非叶子节点数据分散)。
B + 树的
所有数据都存储在叶子节点
,且叶子节点通过链表串联,非叶子节点仅作为索引。这一设计有两个优势:
- 范围查询效率极高(直接遍历叶子节点链表);
- 非叶子节点仅存索引,单个节点可容纳更多关键字,进一步降低树高,减少 IO。
因此,B + 树在磁盘 IO 效率和范围查询上的优势,使其成为数据库索引的最优选择。
# 3.为什么 Redis 的 Zset(有序集合)选择跳表而不选择其他数据结构(如红黑树、B + 树)?
Zset 需要支持插入、删除、查询、范围排名等操作,跳表(Skip List)的实现简单且性能稳定,适合 Redis 的内存数据库场景。
- 跳表:是一种随机化的数据结构,通过在链表上增加 “索引层” 实现快速查询,平均时间复杂度为 O (log n),插入 / 删除时只需修改相邻索引,实现简单(无需旋转等复杂操作)。
- 红黑树:虽然也能实现 Zset 的功能(如按分数排序),但范围查询(如
ZRANGE)需要中序遍历,实现复杂度高,且 Redis 追求代码简洁(跳表逻辑更简单,易于维护)。 - B + 树:多路结构适合磁盘场景,但在内存中无需考虑 IO 效率,且跳表的单值查询、插入效率与 B + 树相当,实现更简单。
Redis 的场景特点是内存操作(无需考虑磁盘 IO),且需要兼顾实现复杂度和性能,跳表的 “随机化平衡” 机制既保证了 O (log n) 的平均性能,又避免了红黑树的复杂旋转逻辑,因此被选为 Zset 的底层实现(Redis 中 Zset 实际是跳表与哈希表的结合,哈希表用于快速查询元素分数)。